Recommend commands for system integration
 1 Purpose
1 Purpose
As more and more of users integrate ComNav high precision GNSS modules into various applications, such as Robotics, UAV, Surveying and Mapping, Precision Agriculture, Automatic Driving, to improve the system's debuggability, it is advisable to reserve a port for communication with the internal module in ComNav's high precision GNSS modules. This allows users to easily view module information at a later time and access the data for analysis when needed.

2 Suggestions for integration
When designing devices equipped with internal memory, it is strongly advised to incorporate a feature that allows storing debug messages. Similar to a regular log file, these debug messages can be invaluable for future debugging purposes, readily accessible whenever needed. Implementing cyclic storage or timed deletion, such as weekly, ensures that the memory usage remains minimal while offering significant assistance for future debugging endeavors. In addition to storing default messages, providing the ability to customize and store specific messages would greatly enhance the functionality of the system.
It is recommended that the system reserve a serial port for communication to the module. When necessary, the module can be connected to a computer, to check the information, status, and debug data for analysis.
3 Recommend messages Here are some highly practical custom messages recommended for ComNav integration. These messages are not only stored in memory by default during system integration but also serve as valuable sources of information for users during testing, aiding in troubleshooting and problem-solving.
This message is designed to check system information comprehensively. It provides details on satellite status, signal quality, potential interference, occlusion, and base station signal quality. It also supports the examination of master-slave dual-antenna information.
The message is particularly useful in environments with interference or occlusion, it effectively reflects the module's status and environmental conditions.
Example of SYSRTS message:
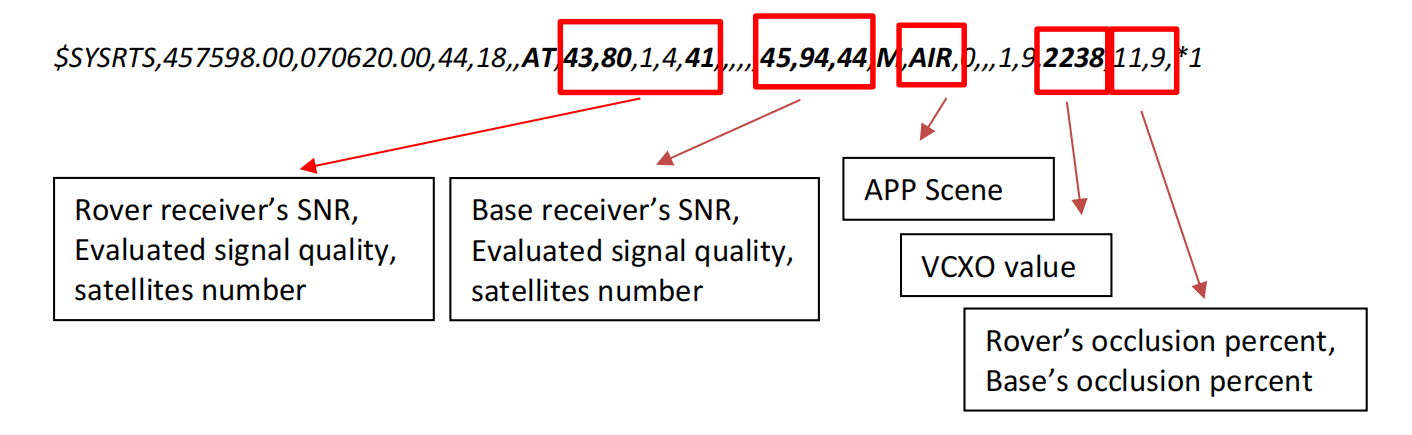
After sign “AT”, it shows the detailed signal quality information for both Rover and Base receiver. And by end of the message, it gives evaluated occlusion percent. Normally, if the evaluated signal quality>85, and occlusion percent<20, the receiver can work with a stable fix in current environment.
The available mode for APP Scene includes survey, robot, car, air, space, which used for different applications. Please get more information in reference manual:
CNT-OEM-RM001_Rev_2.3_20220507
VCXO value is important for timing. At room temperature, the normal range is 2000 o 2400. If the value not in this range, it may cause “ontime X” ”onchanged” not work.
K803 V610T5
K823 V609GI
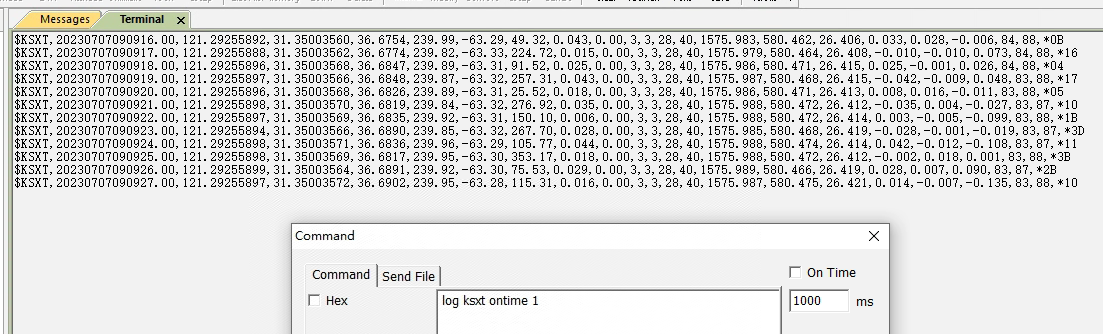
The KSXT message offers positioning, heading, velocity information, as well as the distance to the base station, and signal quality of the master and slave antennas.
It is particularly recommended for dual antenna systems.
Example of KSXT message:
$KSXT,20230707090927.00,121.29255897,31.35003572,36.6902,239.95,-63.28,115.31,
0.016,0.00,3,3,28,40,1575.987,580.475,26.421,0.014,-0.007,-0.135,83,88,*10
A value > 85 is suggested, for better working in the current environment.
K823 V609GI
For details definition of above messages, please have a reference of Appendix.
4 Appendix Description
This message includes the system information, the satellites tracking information of Base station, master and slave stations of Rover, and operational status information.
Recommended Input | log sysrts ontime 1 |
Supported Format | ASCII |
Reply (ASCII)
$SYSRTS,471765.80,110227.80,50,17,,AT,41,86,1,4,47,,,,,,41,85,48,M,SURVEY,0,,,0,9,2172,11,9*6A
| Field# | Structure | Description | Format | Demonstration |
|---|---|---|---|---|
| 1 | $ SYSRTS | Log header | $ SYSRTS | |
| 2 | GPS time | GPS time (s) corresponding to the location | ssssss.ss | 471765.80 |
| 3 | UTC time | UTC time (s) corresponding to the location | hhmmss.ss | 110227.80 |
| 4 | Interrupt utilization | 0~100 (%) | xx | 50 |
| 5 | CPU utilization | 0~100 (%) | xx | 17 |
| 6 | CPU temperature | -50~150 (℃) | xx | |
| 7 | Sign | AT | AT | |
| 8 | ANT1 SNR | 0~100 (dB) | xx | 41 |
| 9 | ANT1 signal quality | 0~100 In unobstructed and interference-free environments, a score of ≥85 | xx | 86 |
| 10 | ANT1 antenna status | 0: No load, 1: Normal, 2: Short circuit, 3: Crosstalk | x | 1 |
| 11 | ANT1 positioning status | Solution status 0: Initialization, 1: Single 2: Code differential (including SBAS solution) 4: RTK fixed solution 5: RTK float solution | x | 4 |
| 12 | ANT1 SVn | ANT1 tracked satellites' number, 0~256 | xx | 47 |
| 13 | ANT2 SNR | 0~100 (dB) Note: If no slave station, the below 4 items(14-17) will be empty. | xx | |
| 14 | ANT2 signal quality | 0~100 In unobstructed and interference-free environments, a score of ≥85 | xx | |
| 15 | ANT2 antenna status | 0: No load, 1: Normal, 2: Short circuit, 3: Crosstalk | x | |
| 16 | ANT2 heading status | Solution status 0: Initialization 1: Single 2: Code differential (including SBAS solution) 4: Fixed solution 5: Float solution | x | |
| 17 | ANT2 SVn | ANT2 tracked satellites' number, 0~256 | xx | |
| 18 | Base station SNR | 0~100 (dB) If the base station differential data is sent in packets, this item will be displayed cyclically based on the packet strategy. The "base station signal quality" and "base station tracked satellites' number" follow same strategy. | xx | 41 |
| 19 | Base station signal quality | 0~100 In unobstructed and interference-free environments, a score of ≥85 | xx | 85 |
| 20 | Base station SVn | 0~256 | xx | 48 |
| 21 | Sign | M | M | |
| 22 | Scene mode | Survey、Robot、Car、Air、Space | X | Survey |
| 23 | Ionospheric activity index | 0~200 (mm) >50 indicates that the current ionosphere is relatively active | x | 0 |
| 24 | Interference indication | 0: No interference, 1: Interference detected | x | |
| 25 | Deception indication | 0: No interference, 1: Interference detected | x | |
| 26 | IMU | 0: IMU turned off; 1: IMU turned on, initialization unsuccessful; 2: IMU turned on, initialization successful; 3: IMU turned on, and the orientation estimation using combined state is completed, entering the vehicle kinematic constraint model | x | 0 |
| 27 | System time | 0~9 0: System time not available, 1-8: System time being adjusted, available but unstable, 9: System time stable and available | xx | 9 |
| 28 | VCXO crystal oscillator value | Voltage Controlled Crystal Oscillator (VCXO) value, ranging from 0 to 9999. At room temperature, the normal range is 2000 to 2400. This value decreases with temperature increase and increases with temperature decrease | xxxx | 2172 |
| 29 | Rover station obstruction rate | Obstruction rate = 100% - Tracked satellite count / Theoretical satellite count. The smaller the value, the better the performance | x | 11 |
| 30 | Base station obstruction rate | x | 9 | |
| 31 | Checksum | CheckSum | *hh | *6A |
Description
This message includes GNSS receiver information such as time, location, positioning and heading.
Recommended Input | log sysrts ontime 1 |
Supported Format | ASCII |
Reply (ASCII)
$KSXT,20220815021257.00,121.29235950,31.34993419,39.6784,77.93,51.29,50.16,0.001,0.00,1,3,40,
35,,,,0.001,0.001,0.007,71,88,*12
| Field# | Structure | Description | Format | Demonstration |
|---|---|---|---|---|
| 1 | $KSXT | Log header | $KSXT | |
| 2 | utc | UTC time (s) corresponding to the location | yyyy/mm/dd/hh/mm/ss | 20220815021257.00 |
| 3 | Lon | Longitude, in degrees, keep 8 significant digits after the decimal point | xxx.xxxxxxxx | 121.29235950 |
| 4 | Lat | Latitude, in degrees, keep 8 significant digits after the decimal point | xx.xxxxxxxx | 31.34993419 |
| 5 | Height | Altitude, in degrees, keep 4 significant digits after the decimal point | xx.xxxx | 39.6784 |
| 6 | Heading | Azimuth angle (0-360°), keep 2 significant digits after the decimal point | 77.93 | |
| 7 | Pitch | Pitch angle(±90°), keep 2 significant digits after the decimal point | 51.29 | |
| 8 | Track true | True north track angle(0-360°), keep 2 significant digits after the decimal point | 50.16 | |
| 9 | Vel | Velocity: Unit: km/h, keep 3 significant digits after the decimal point | 0.001 | |
| 10 | Roll | Roll angle(±90°), keep 2 significant digits after the decimal point | 0.00 | |
| 11 | Position qual | GNSS positioning quality indicator: 0 = fix not available or invalid 1 = Single-point positioning 2 = RTK float 3 = RTK fixed ambiguity solution | x | 1 |
| 12 | Heading qual | Receiver RTK heading and pitch quality indicator: 0 = fix not available or invalid 1 = Single-point positioning 2 = RTK float 3 = RTK fixed ambiguity solution | x | 3 |
| 13 | #SsolnSVs | Number of satellites that anticipate in calculation of slave station | x | 40 |
| 14 | #MsolnSVs | Number of satellites that anticipate in calculation of master station | x | 35 |
| 15 | Pos East | East position coordinates: the east position in the geographic coordinate system with the base station as the origin, keep 3 significant digits after the decimal point | xxx.xxx | |
| 16 | Pos north | North position coordinates: the north position in the geographic coordinate system with the base station as the origin, keep 3 significant digits after the decimal point | xxx.xxx | |
| 17 | Pos up | Zenithal position coordinates: the zenithal position in the geographic coordinate system with the base station as the origin, keep 3 significant digits after the decimal point | xxx.xxx | |
| 18 | Vel east | Easting Velocity: Easting velocity in geographic coordinate system, keep 3 significant digits after the decimal point | xxx.xxx | 0.001 |
| 19 | Vel north | Northing Velocity: Northing velocity in geographic coordinate system, keep 3 significant digits after the decimal point Unit: km/h (empty if not available) | xxx.xxx | 0.001 |
| 20 | Vel north | Zenithal velocity: the zenithal velocity in the geographic coordinate system, keep 3 significant digits after the decimal point Unit: km/h (empty if not available) | xxx.xxx | 0.007 |
| 21 | M SNR | The current carrier-to-noise ratio value of the master antenna | 95~100: Excellent 90~94: Good 85~89: Moderate 80~84: Fair <80: Poor | Data quality metrics for the master antenna |
| 22 | S SNR | The current carrier-to-noise ratio value of the slave antenna | 95~100: Excellent 90~94: Good 85~89: Moderate 80~84: Fair <80: Poor | Data quality metrics for the slave antenna |
| 23 | *xx | XOR checksum (hexadecimal string, calculated from the frame header onwards) | *hh | *12 |
| 24 | [CR][LF] | Sentence terminator | - | [CR][LF] |
About ComNav Technology
ComNav Technology develops and manufactures GNSS OEM boards and receivers for high precision positioning demanded applications. Its technology already been used in a wide range of applications such as surveying, construction, machine control, agriculture, intelligent transportation, precise timing, deformation monitoring, unmanned system. With a team dedicated for the GNSS technology, ComNav Technology is trying its best to supply reliable and competitive products to worldwide customers. ComNav Technology has been listed on the Shanghai Stock Exchange (Science and Technology Board), securities :ComNav Technology (Compass Navigation), Stock code: 688592.
About SinoGNSS®;
SinoGNSS®; is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.
About ComNav Technology
ComNav Technology develops and manufactures GNSS OEM boards and receivers for high precision positioning demanded applications. Its technology already been used in a wide range of applications such as surveying, construction, machine control, agriculture, intelligent transportation, precise timing, deformation monitoring, unmanned system. With a team dedicated for the GNSS technology, ComNav Technology is trying its best to supply reliable and competitive products to worldwide customers. ComNav Technology has been listed on the Shanghai Stock Exchange (Science and Technology Board), securities :ComNav Technology (Compass Navigation), Stock code: 688592.
About SinoGNSS®
SinoGNSS® is the official trademark of ComNav Technology Ltd., registered in People's Republic of China, EU, USA and Canada. All other trademarks are the property of their respective owners.